

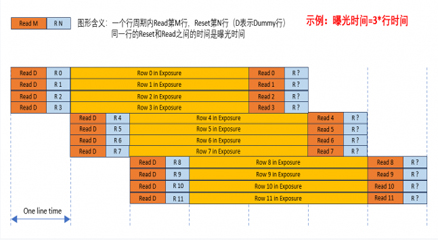
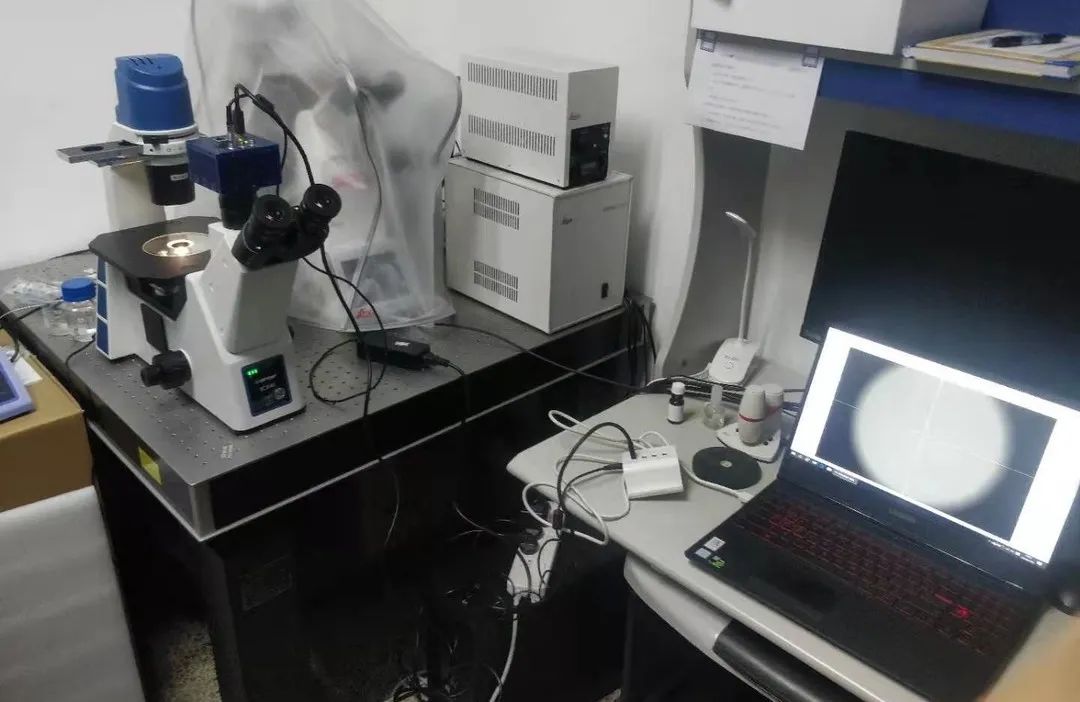
1、高速摄像系统在仿生机器人研究中的应用
软跳跑机器人可跃过数倍于自身高度的障碍物,其跳跃运动的突发性与爆发性有利于躲避危险,因此在众多领域机器人研发设计中备受关注。但在软跳跑机器人研发设计中,人眼无法清楚观测到最关键的跳跃瞬间和完整跳跃过程,普通测量方法又存在一定误差,导致机器人研究设计无法得到精准验证。 哈尔滨工业大学科研老师在研究软跳跑机器人设计实验中,为清楚观测到机器人在快速跳跃全过程,采用千眼狼高速摄像系统对软驱动器驱动的机器人跳跃运行过程进行高速采集,通过高速慢放观察分析机器人运动姿态与运动速度,精准验证软跳跑机器人设计应用的可行性,进一步洞察目标动物的复杂运动。(更多详情请见中国知网《Soft and Fast Hopping–Running Robot with Speed of Six Times Its Body Length Per Second》) 2、软跳跑机器人实验 1/2.软跳跑机器人设计

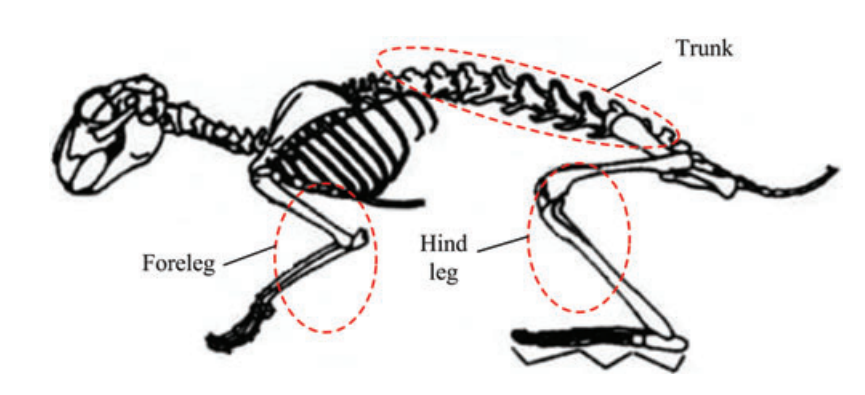
图1-1 兔子骨骼示意图
本次仿生实验软跳跑机器人设计模仿兔子的前后腿跳跃、运行动作,将两条后肢简化为一条腿。基于这种简化,实验采用两个具有DEMES(介电弹性体最小能量结构)的软旋转关节来模拟前后腿,当施加周期性电压时,DEMES旋转接头可以输出往复旋转。

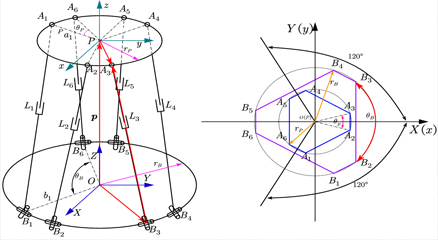
图1-2 软跑机器人的模型原理图和参数
软跳跑机器人可以看作是驱动机器人运动的两个DEMES旋转关节θ1和θ4的组合。当电压施加到关节时,θ2和θ4增加。如果软跳跑机器人能实现希望奔跑动作,机器人循环运动的每个周期应该包括四种典型状态:初始、上升、跳跃和接触。

图1-3 前肢和后肢的受力图
如图1-3所示,前肢在A点与地面接触,其向心力Fn的大小由DEMES关节的驱动力矩决定,Fn可分为向前力Tf和升力Fl。软跳跑机器人需要大的提升力Fl来提升头部,因为上升状态的持续时间非常短,而电压频率相当高。因此,θ1应该是一个小角度。考虑到DE膜的粘弹性,在连续交替变形时,关节角不能回到静态初始角度,因此在运动期间静态初始θ1小于动态最小θ1。根据反复分析验证,最终确定实验机器人设计为质量、长度、宽度和高度分别是6.5g、8.5cm、4.8cm和50cm。 2/2.软跳跑机器人的制作

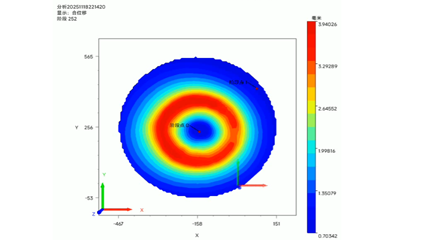
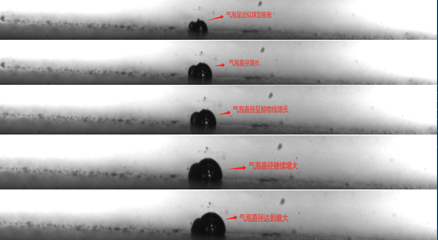
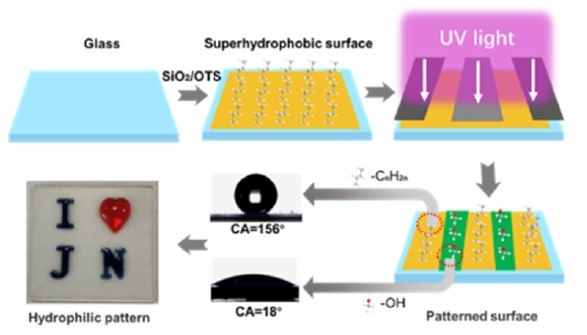
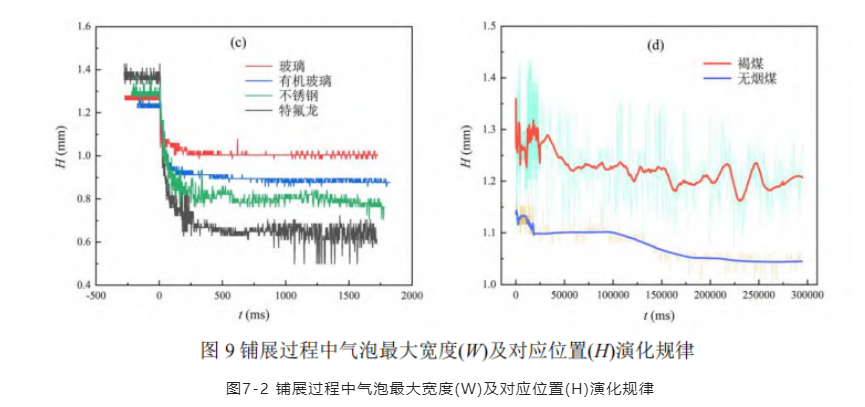
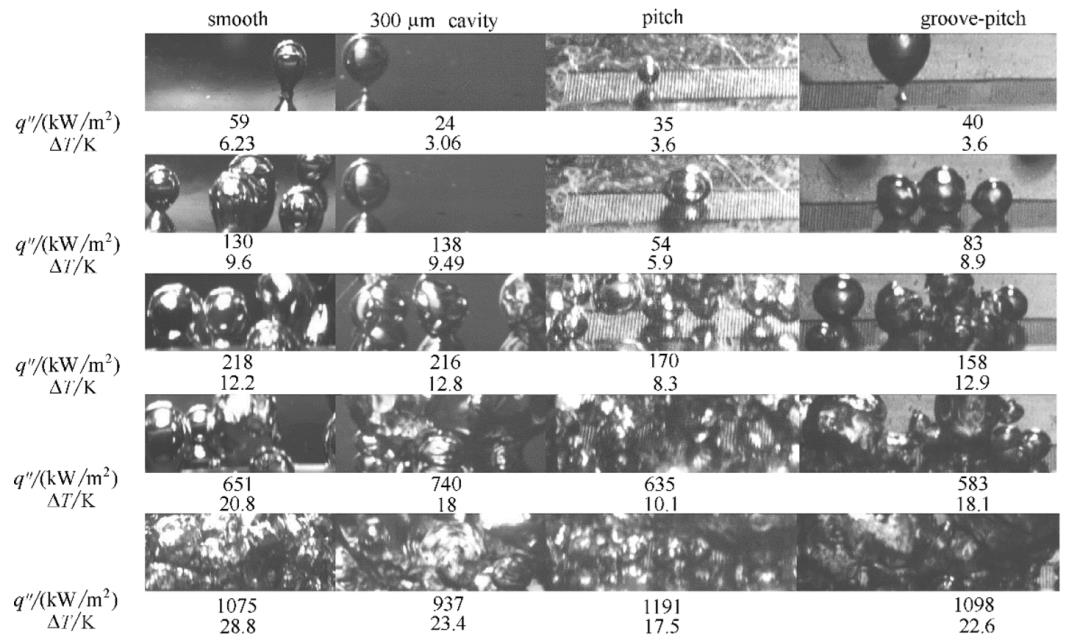
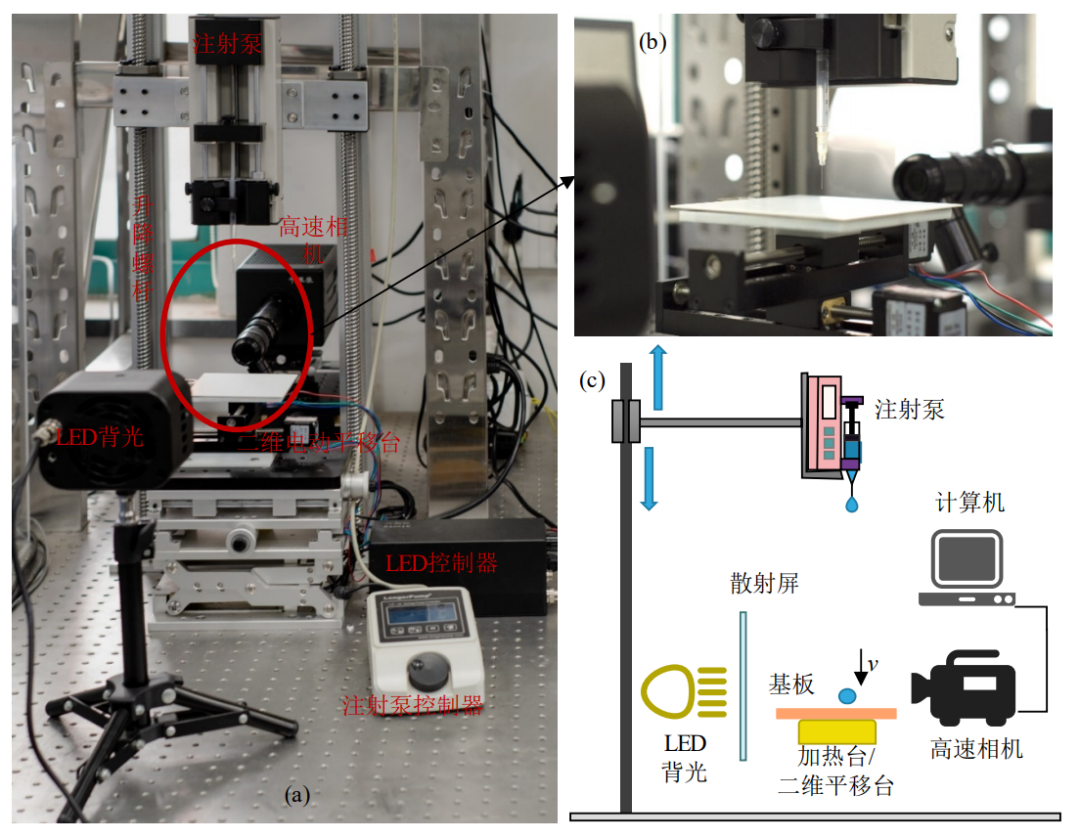
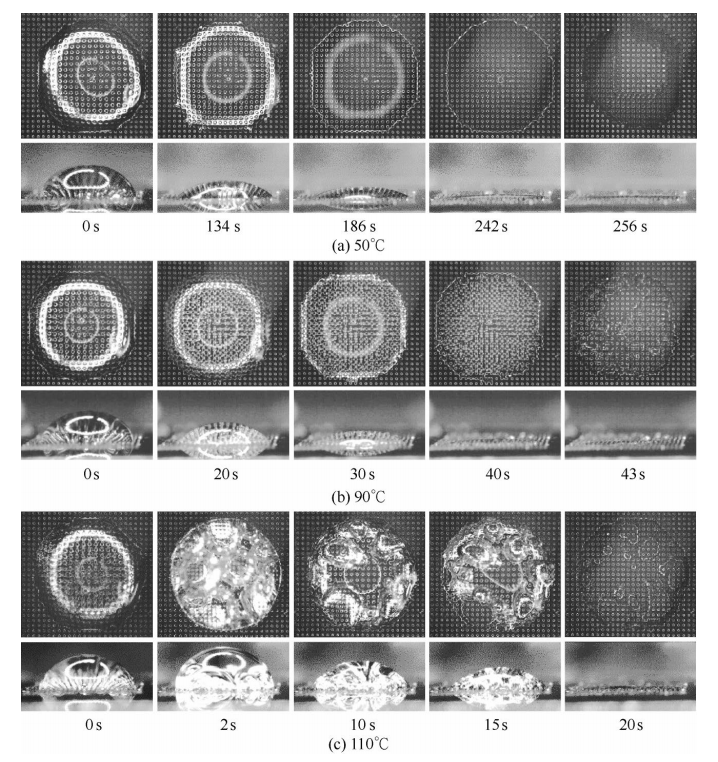
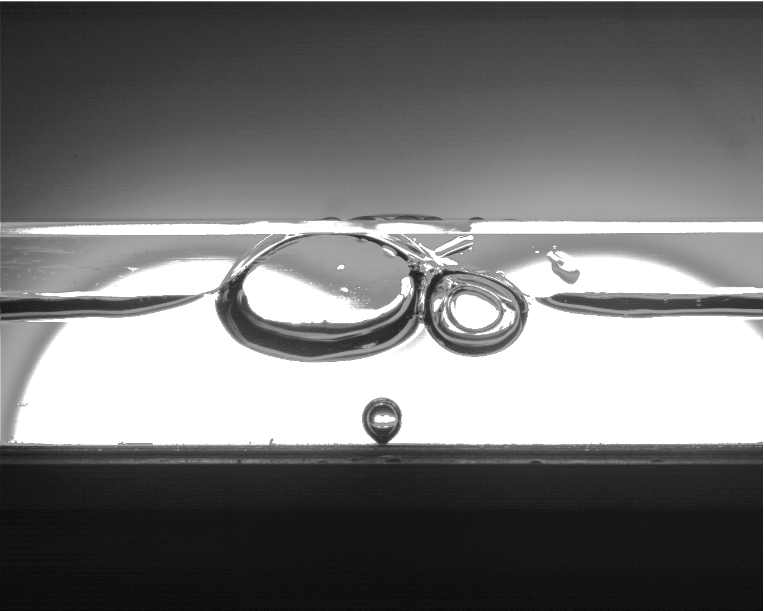
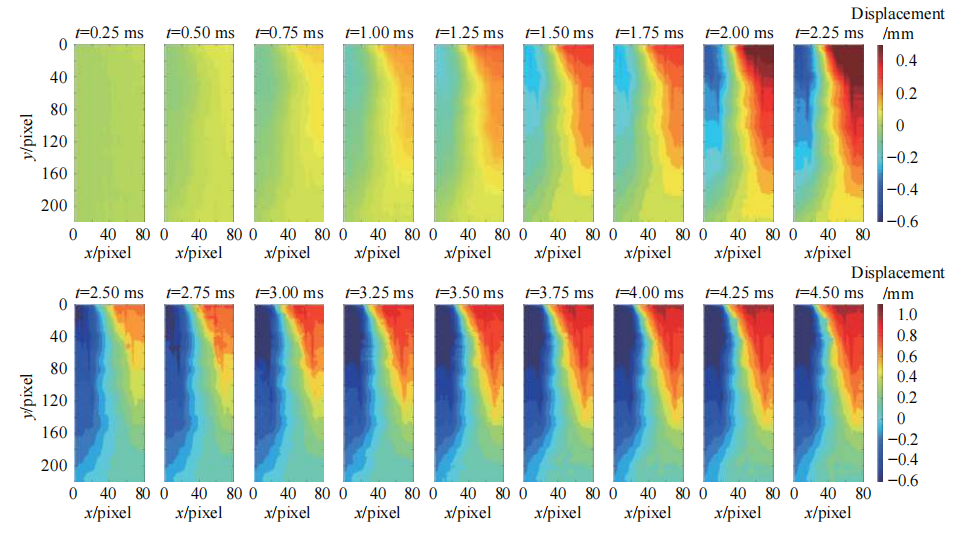
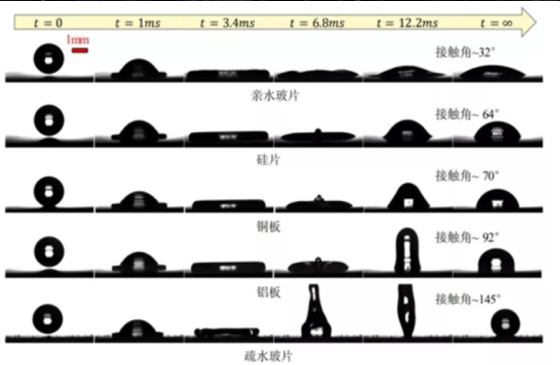
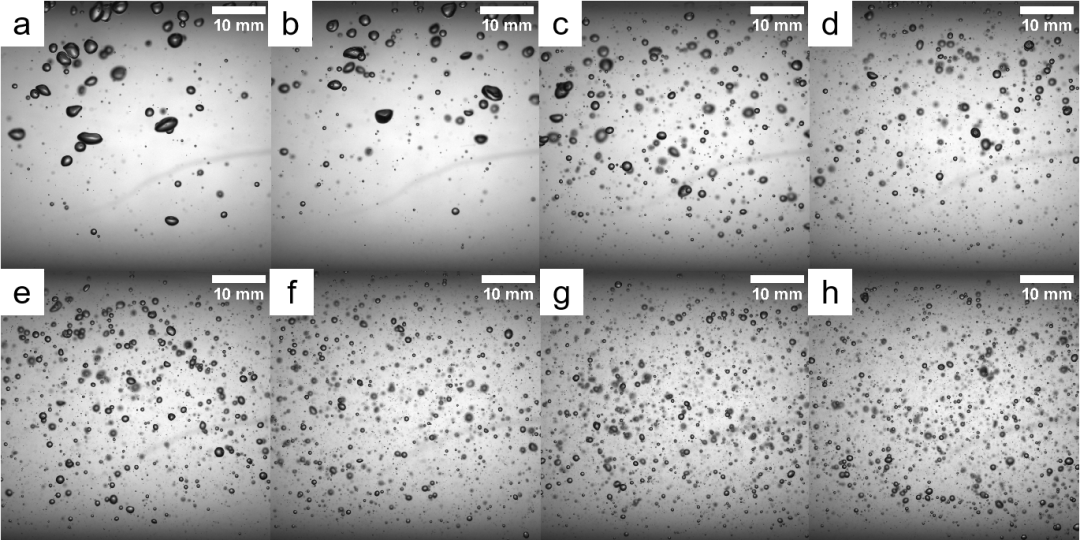
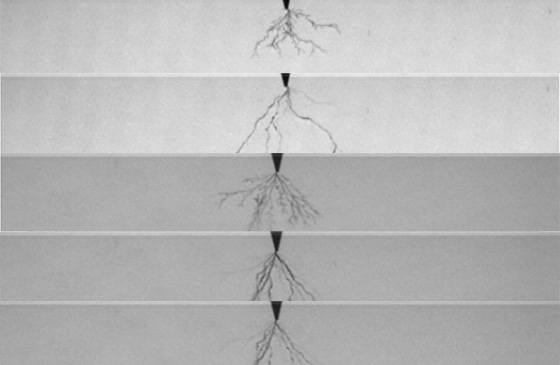
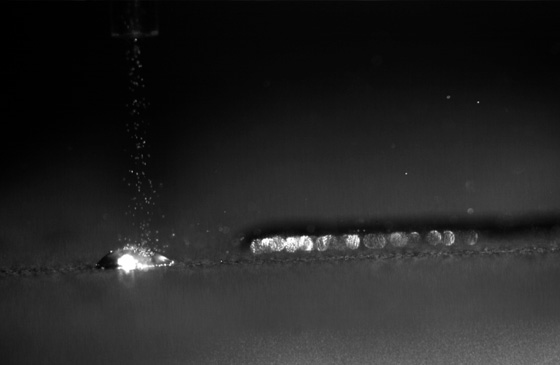
图2-1 润湿性对液滴铺展收缩过程的影响
机器人制造前准备一个由聚酯制成的主框架,具有一个近似椭圆形的孔、两个半圆形加强框架和一片DE膜,如图2-1所示。选择 VHB™4910作为DE膜,并且在每个方向上具有400%的双轴预应变,该膜可以保持在90°的连接角度下,预应变至少为254%,这可以确保足够的电压感应变,并且避免快速机电不稳定。在预拉伸薄膜的两侧涂上柔顺的碳脂电极,并将主框架安装在薄膜的两侧。

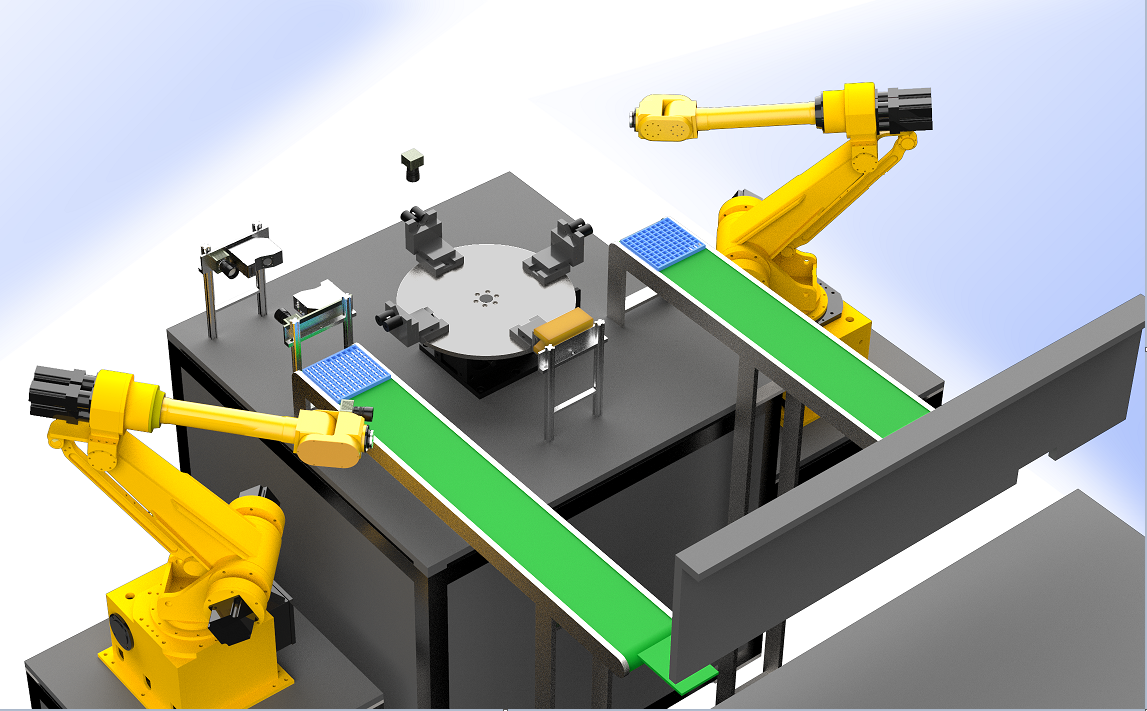
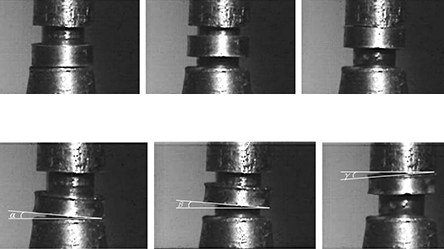
图2-2 跳跃行走机器人的原理图制作过程
(a)弯曲主框架;(b)在主框架上粘贴两个加强框架;(c)用碳脂粘两层预拉伸DEs;(d)将(c)固定在(b)上;(e)按照(a) - (d)步骤制作前肢和后肢;(f)制作躯干;(g)连接躯干和腿;(h)在后腿上安装海绵脚;DEs介电弹性体。
为防止机器人和地面之间的滑动,一只脚被安装在后腿的底部,增加静摩擦力以利于向前运动。脚由海绵制成,以实现更大的静摩擦系数。后备箱由0.35mm厚的聚酯薄膜制成,通过选择性地加热聚酯并将其压在制动工具上,可以改变聚酯框架的初始弯曲角度。辅助图S1中显示了制动工具和具有选择性弯曲初始角度的主车架的制造。加强框架由0.25mm厚的聚酯薄膜制成。
3/2.软跳跑机器人测试



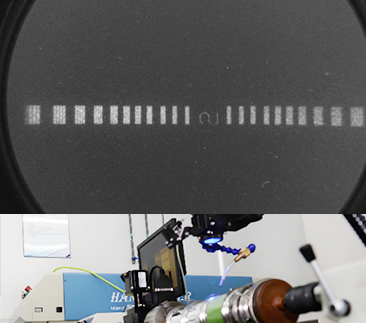
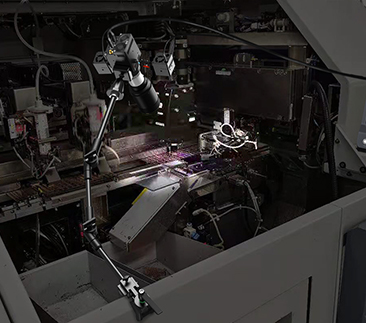
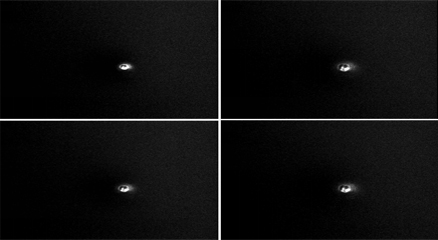
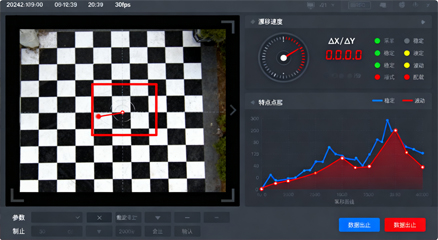
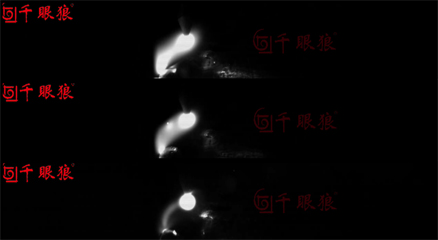
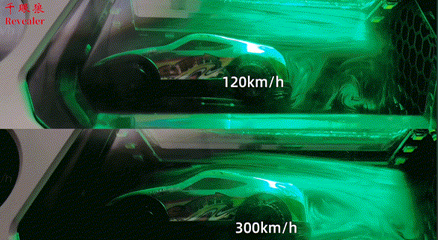
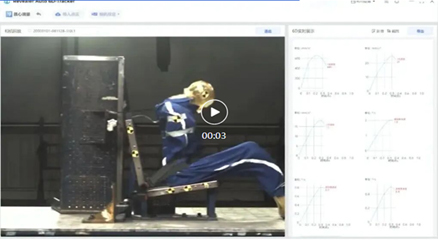
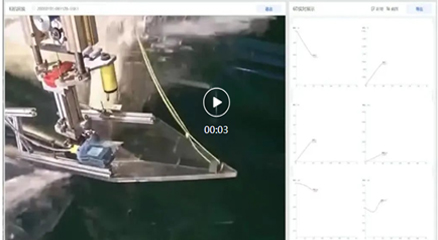
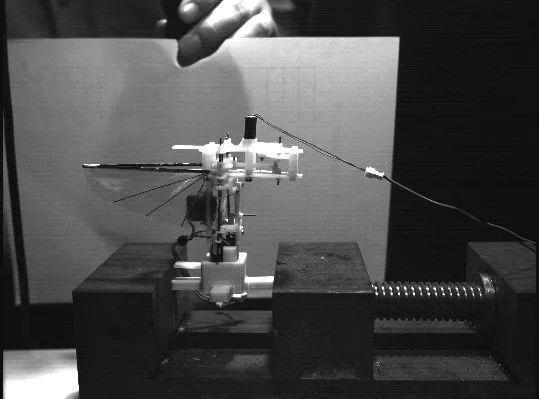
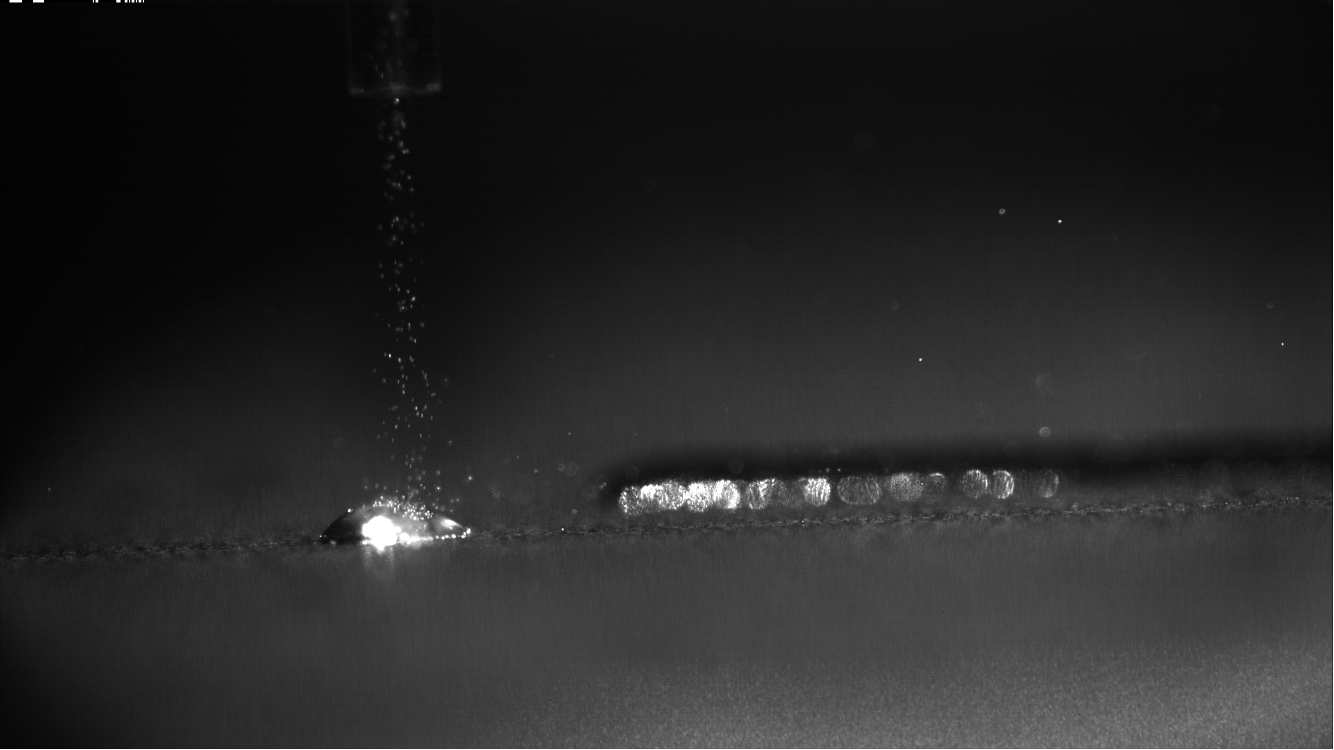
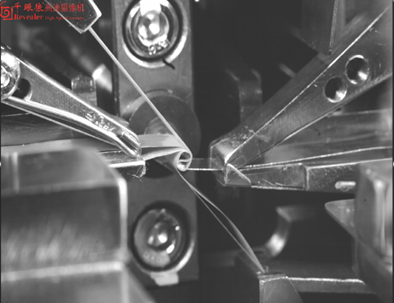
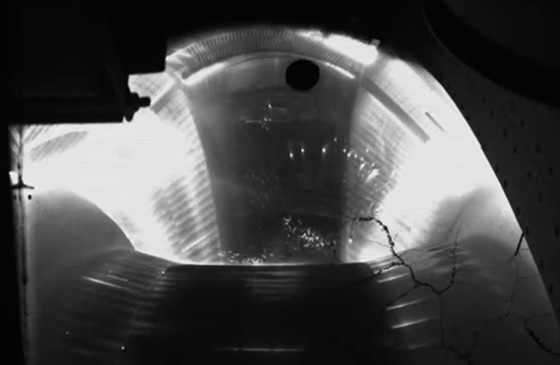
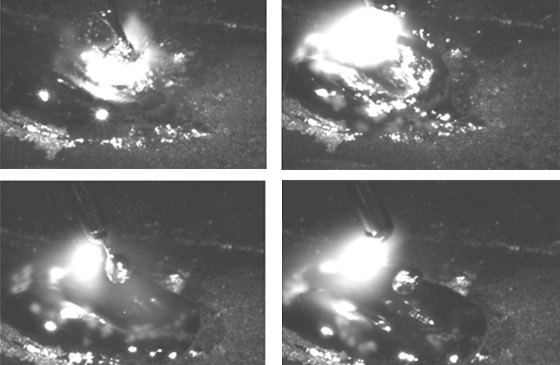
图3-1 机器人运行的高速图像分析
(a)以500 Hz的帧率拍摄一段运动期间四种典型状态的高速视频;(b)在一个运动周期的典型状态下推力的平均值;(c)高速奔跑时拍摄的录像。
在软跳跑机器人测试中采用千眼狼高速摄像系统对其运动过程进行实时图像采集,并分析运动周期内不同运动状态,验证实验数据。通过高速摄像系统捕捉到了,机器人四种典型状态,证明软跳跑机器人可以实现典型运动状态。在运动过程中,质心的最大升力为1.97mm;当施加高频驱动电压时,这种短提升有利于产生更高的运行速度。通过高速摄像系统分析平均推力,验证典型状态和施加电压之间的关系。当运行速度达到51.83cm/s,如图3-1c所示,说明软跳跑机器人可以实现高速运动。
图3-2 机器人在不同表面上的图片
此外,实验测试了机器人在光滑和粗糙表面(木头、大理石、砂纸、橡胶)上运行时的运动性能,如图3-2所示。实验测量了机器人能跑50cm的持续时间,计算出它们的平均速度。

图3-3 不同电压频率下机器人在不同表面上的运行速度
运行速度首先随着施加电压的频率而增加,在达到最大值后,运行速度随后降低。如果表面的粗糙程度适中,机器人可以跑得更快。在四种类型的表面上,机器人可以在10-30Hz的有限驱动频带内快速运行,驱动频率低于这个频段,机器人的运动将会变慢;驱动频率超过这个频带,那么机器人不能完全实现四种运动状态。
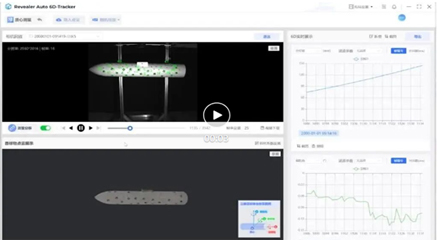
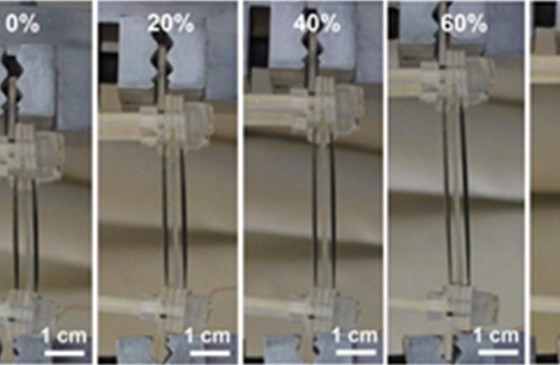
图3-4 机器人在不同坡度的斜坡上运行
(a)奔跑时拍摄的视频;(b)不同电压频率驱动的运行速度。
通过高速摄像采集机器人在不同坡度的斜坡上行驶图像,对其运行速度与电压频率的关系进行分析。如图3-4所示,为测试机器人负载能力,将等于其自身重量(6.5g)的负载安装到身体上。机器人在粗糙的木头上运行,不同电压频率驱动负载的机器人运行速度如图3-5所示。从数据中可以发现,机器人在负重时仍然跑得很快(每秒超过4个身长)。机器人在19Hz的驱动频率下达到其最大速度,这高于空载时(17Hz),因为与空载机器人跳跃状态的持续时间相比负载机器人跳跃状态的持续时间更短,运动周期也更短;所以,它需要更高的驱动频率才能跑得更快。
图3-5 机器人在与自身重量相等的负载下和在粗木上不同电压驱动的运行速度分析图
此外,实验还研究了外加电压对运行速度的影响。一般来说,电压幅度越大运行速度越高,但时间中发现如果频率太高,较大的电压幅度会产生较低的运行速度。主要原因是电压频率太高,DE膜不能充分放电,放电不足降低了DEMES接头的输出角度,因此其驱动能力下降更为明显。在5.0和5.5千伏的驱动电压下,当电压频率>32Hz时,输出关节角度太小,无法继续保持向前或向后运动。 3、实验结果 本次实验提出了一个简单的跳跃-奔跑机器人,由肌肉类弹性执行器驱动,两个灵活的关节组成,模拟兔子等小型哺乳动物的前肢与后肢。运动实验表明,该机器人在光滑和粗糙表面都能高速奔跑,特别是在粗糙的木材上,行驶速度达到51.83cm/s频率17Hz;在21Hz和19Hz时,橡胶和大理石的最大奔跑速度分别为50.24cm/s和46.79cm/s。机器人还可以在25Hz下以18.34cm/s的最大速度爬上16°的斜坡。此外,软机器人可以承载高达10克的负载并保持运动,展示了其承载自己的电源和控制电路的潜在能力。实验证明了DEs在软而快速运行的机器人中应用的可行性,通过使用更多层的DE膜来增加机器人腿部的驱动扭矩,提高跑步性能。层数越多,腿的功率密度就越大。 4、总结 实验结合理论仿生数值分析,采用高速摄像系统对跳跃奔跑机器人运动过程进行实验验证。千眼狼高速摄像分析系统作为仿生学研究仪器之一,可以帮助科研人员进一步洞察目标动物运动,设计出更复杂的仿生机器人,助力我国微型机器人、生物医疗机器人研究发展。(此文源自哈尔滨工业大学路士州教授)
电话:400-859-1866
邮箱:sales@agiledevice.com
地址:安徽省合肥市包河富煌新视觉大厦

微信公众号

官方抖音














































































































 400-859-1866
400-859-1866